


Отладка источников питания постоянного тока с помощью осциллографа эконом класса
Авторы:
Андреас Гримм (Andreas Grimm - Sales Manager Europe Rohde & Schwarz),
Павел Струнин - Руководитель направления ООО «РОДЕ и ШВАРЦ РУС»
Стабильное электропитание – залог долгосрочной эксплуатации интегральных схем. И хотя в первую очередь это касается высококлассных интегральных схем, построенных на программируемых логических матрицах FPGA (ПЛИС), даже менее скоростные последовательные шины могут порождать значительные помехи. Быстрый анализ с помощью осциллографа эконом-класса помогает существенно улучшить производительность системы. Использование ряда оптимизированных настроек осциллографа позволяет заметно повысить результативность такого анализа.
В настоящей статье рассматриваются методы оптимизации анализа явлений, возникающих в источниках электропитания встраиваемых систем. Анализ на примере постоянного напряжения питания ПЛИС с CAN-интерфейсом выполняется с помощью осциллографа RTB2000.
1. Оптимизация настроек для измерения постоянного напряжения
Сначала выполним анализ постоянного напряжения без использования специальных настроек. На рисунке 1 показан пример измерения постоянного напряжения с помощью пассивного пробника (10:1), подключенного к источнику питания постоянного тока. Чтобы сигнал отобразился на экране прибора, масштаб по вертикали задан равным 1 В/дел; при этом для обнаружения пульсаций используется измерение размаха напряжения, включающее сбор статистических данных. Значение постоянного напряжения, измеренное встроенным вольтметром, равно 4,92 В. При этом среднее измеренное значение пульсаций составляет 179,90 мВ (отмечено красной окружностью с помощью встроенного инструмента аннотирования, используемого для документирования результатов).

Рисунок.1 Измерение постоянного напряжения без оптимизации настроек осциллографа
Почему же вертикальное разрешение осциллографа играет столь важную роль? В данном случае быстрая первоначальная оценка дает теоретическое разрешение осциллографа. Прибор RTB2000 использует 10-разрядный АЦП и, таким образом, поддерживает 1024 уровня принятия решений. Масштаб по вертикали равен 1 В/дел, что обеспечивает работу в полном диапазоне шириной 10 В. Как показывают расчеты, теоретическое разрешение осциллографа составляет приблизительно 10 мВ. И хотя кривая напряжения питания выглядит гладкой, средний уровень пульсаций, полученный более чем по 10 тыс. измерений, составляет 179,90 мВ, т. е. 3,5 % от уровня напряжения питания. Для повышения точности измерения установлено смещение канала 4,92 В, чувствительность 20 мВ/дел, что позволяет увеличить точность в 50 раз!
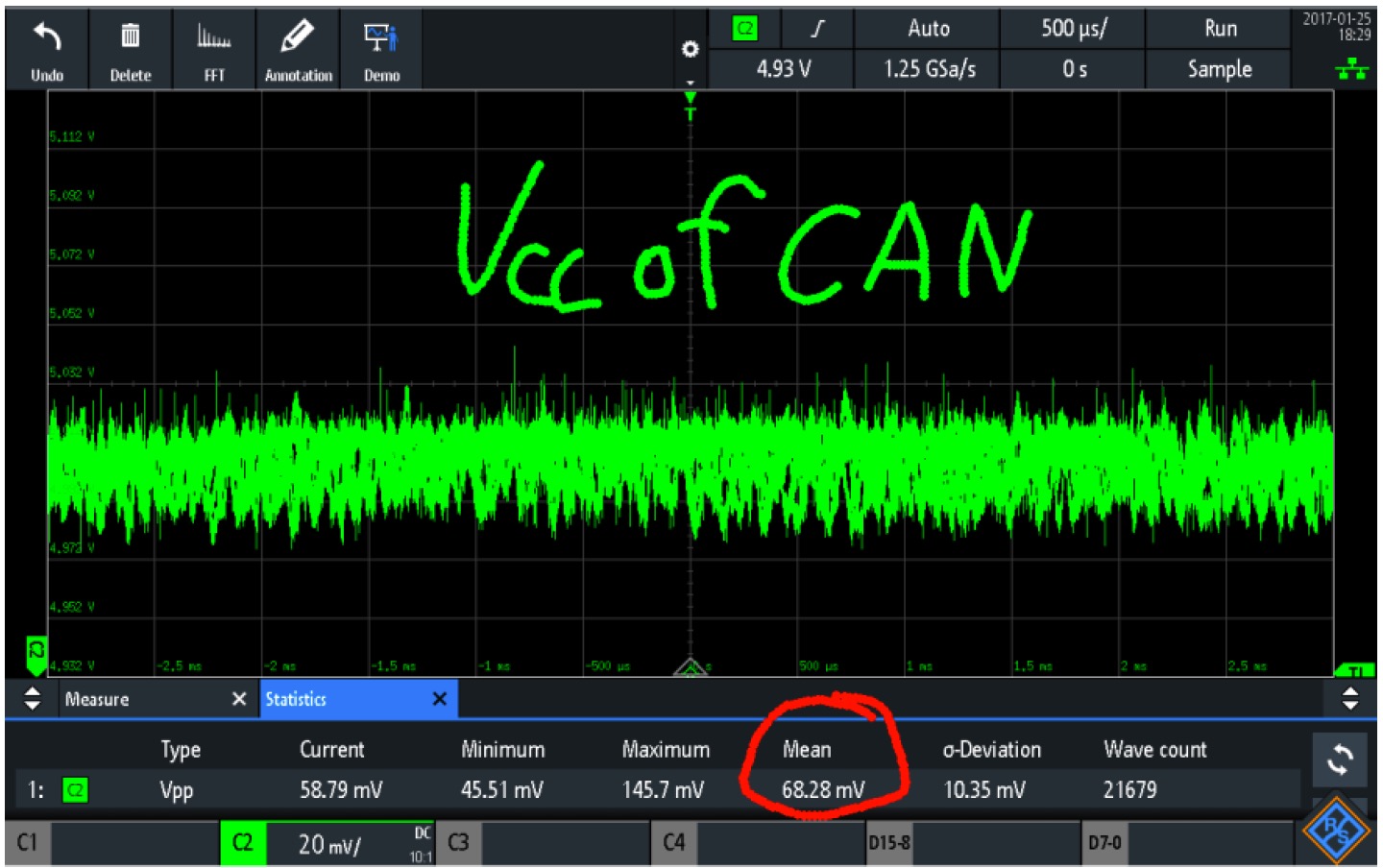
Рисунок.2. Более точные результаты измерения, полученные благодаря правильным настройкам системы вертикального отклонения и передовой технологии построения входного каскада.
Как видно из рисунка 2, среднее значение, рассчитанное при измерении размаха напряжения, теперь равно 68,28 мВ. Это значение приблизительно в 2,5 раза меньше того, которое было получено при начальном измерении, и намного точнее – разрешение 10-разрядного АЦП в этом случае составляет около 0,2 мВ.
2. Идентификация помех источника питания постоянного тока
Вторым этапом является идентификация и сопоставление помех, вносимых в постоянное напряжение другими событиями. Просматривая изменения сигнала, отраженные на рисунке 2, сложно идентифицировать эти помехи, поскольку масштаб по временной оси выбран не оптимально. Общепризнанным подходом является выполнение захвата сигнала в интервалах большей длительности, что позволяет увеличить вероятность обнаружения связанных событий, которые зачастую возникают в медленных сигналах. Типовым источником связанных событий во встраиваемых системах является преобразователь переменного тока в постоянный (AC/DC). Возникновение таких событий может быть связано с частотой электросети (50 Гц в странах Европы). Для идентификации подобных последовательностей необходимо установить масштаб по временной оси 10 мс/дел. На рисунке 3 такая конфигурация используется совместно с дополнительным окном масштабирования. Верхняя кривая позволяет идентифицировать последовательность событий, возникающих приблизительно каждые 25 мс. Нижняя кривая представляет сигнал, увеличенный в 1000 раз. Для указания дополнительных обнаруженных выбросов, возникающих приблизительно каждые 15 мкс, используется встроенный инструмент аннотирования осциллографа RTB2000. Таким образом, на экране прибора отображаются два периодических события.
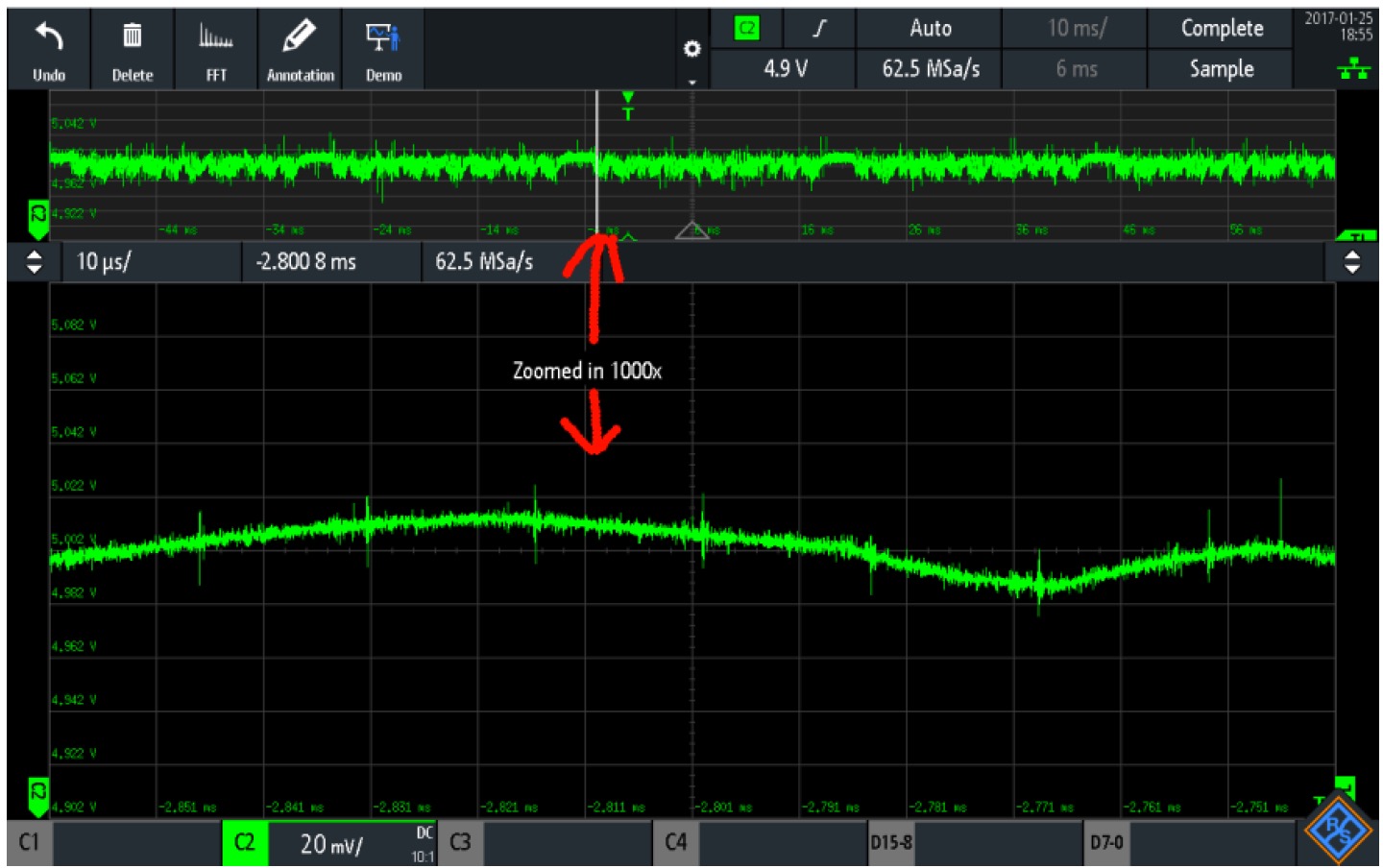
Рисунок. 3. Связанные события, повторяющиеся с низкой и высокой частотами, захватываются с использованием долговременной памяти.
Оба периодических события могут быть отображены на одном экране благодаря встроенной в прибор RTB2000 стандартной памяти для собранных данных объемом 10 млн отсчетов на канал, позволяющей работать на стабильно высокой частоте дискретизации. В рассматриваемом примере это означает, что захват выполняется в полном интервале 120 мс с частотой дискретизации 62,5 млн отсчетов/с. Другими словами, обеспечивается возможность идентификации событий в наносекундном диапазоне, т. е. возможность надежного обнаружения событий, повторяющиеся с высокой частотой. В настоящей статье основное внимание уделяется анализу первопричин возникновения более длительных периодических событий, которые появляются с меньшей частотой и обладают амплитудой, меняющейся в широких пределах.
Осциллограф смешанных сигналов RTB2000 опционально поддерживает до 16 цифровых входных каналов, а также функцию синхронизации и декодирования сигналов последовательной шины CAN. Один из таких цифровых каналов используется для захвата телеграмм шины CAN. Декодирование сигналов этого протокола выполняется с использованием аппаратного ускорения и цветовой схемы, позволяющей идентифицировать адреса записи/чтения, данные и все остальные биты сообщения шины CAN. На снимке экрана, приведенном на рисунке 4, показан сигнал цифрового канала, а также декодированная телеграмма шины CAN вместе с напряжением источника питания постоянного тока.
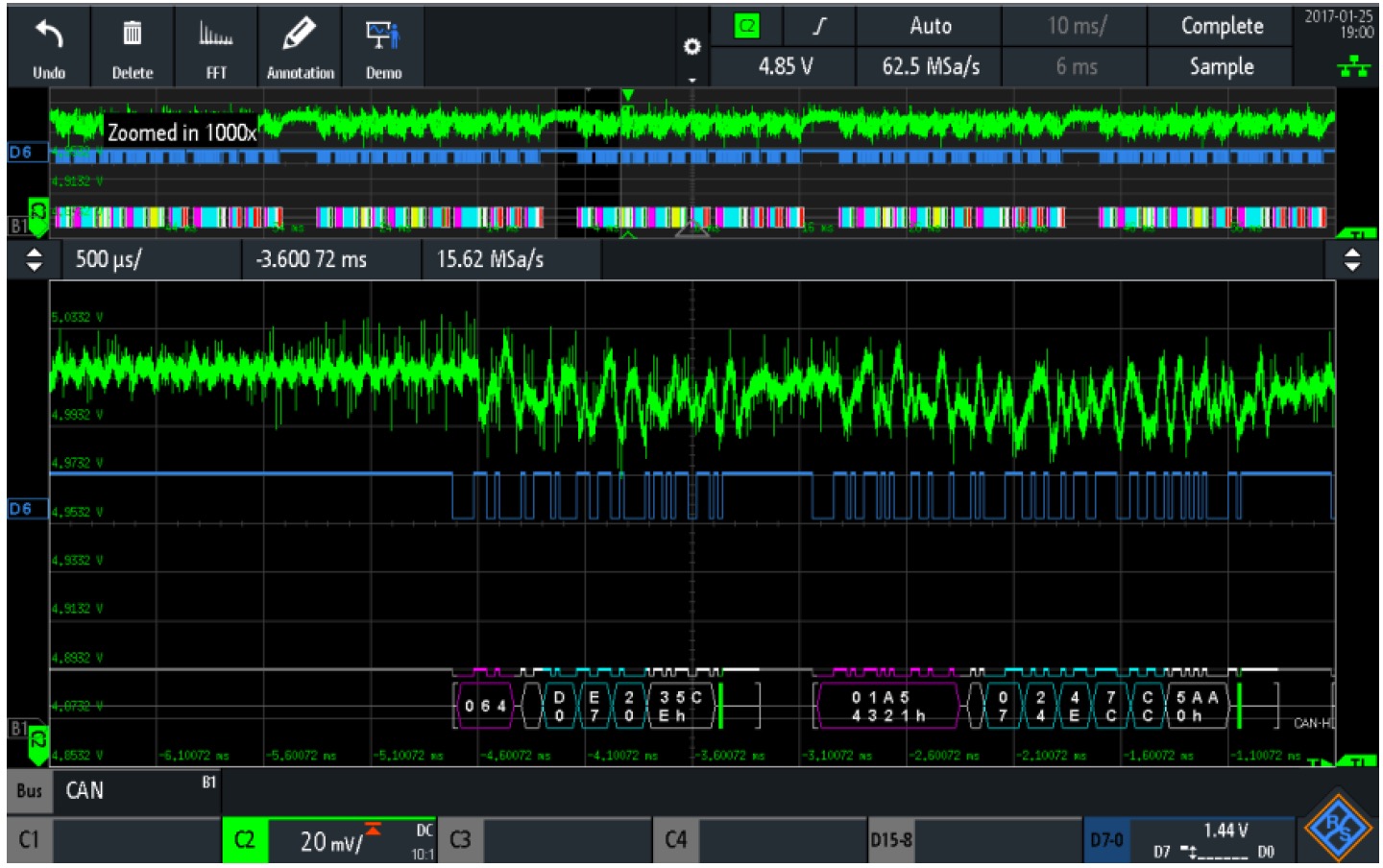
Рисунок. 4. Одновременное отображение аналогового постоянного напряжения, а также данных протокола шины CAN в виде цифрового и декодированного сигналов.
Последовательность событий, появляющихся в постоянном напряжении каждые 25 мс, может быть непосредственно связана с телеграммой шины CAN. Каждый раз, когда ПЛИС начинает передачу данных по шине CAN, нагрузка на источник питания постоянного тока возрастает, что и приводит к появлению пульсаций. Если посмотреть на изменения постоянного напряжения в окне масштабирования, можно заметить, что основные пульсации возникают вследствие переключения битов, однако степень влияния этого процесса сложно оценить из-за наложенного шума. В рассматриваемом примере можно выделить пульсации, вызываемые исключительно переключением битов, выполнив синхронизацию по отдельному адресу шины CAN и/или данным и задействовав способность ИУ передавать повторяющиеся сообщения шины CAN. Прибор RTB2000 настроен на синхронизацию по периодической телеграмме шины CAN и выполняет усреднение по нескольким выборкам. Полученные результаты показаны на рисунке 5.
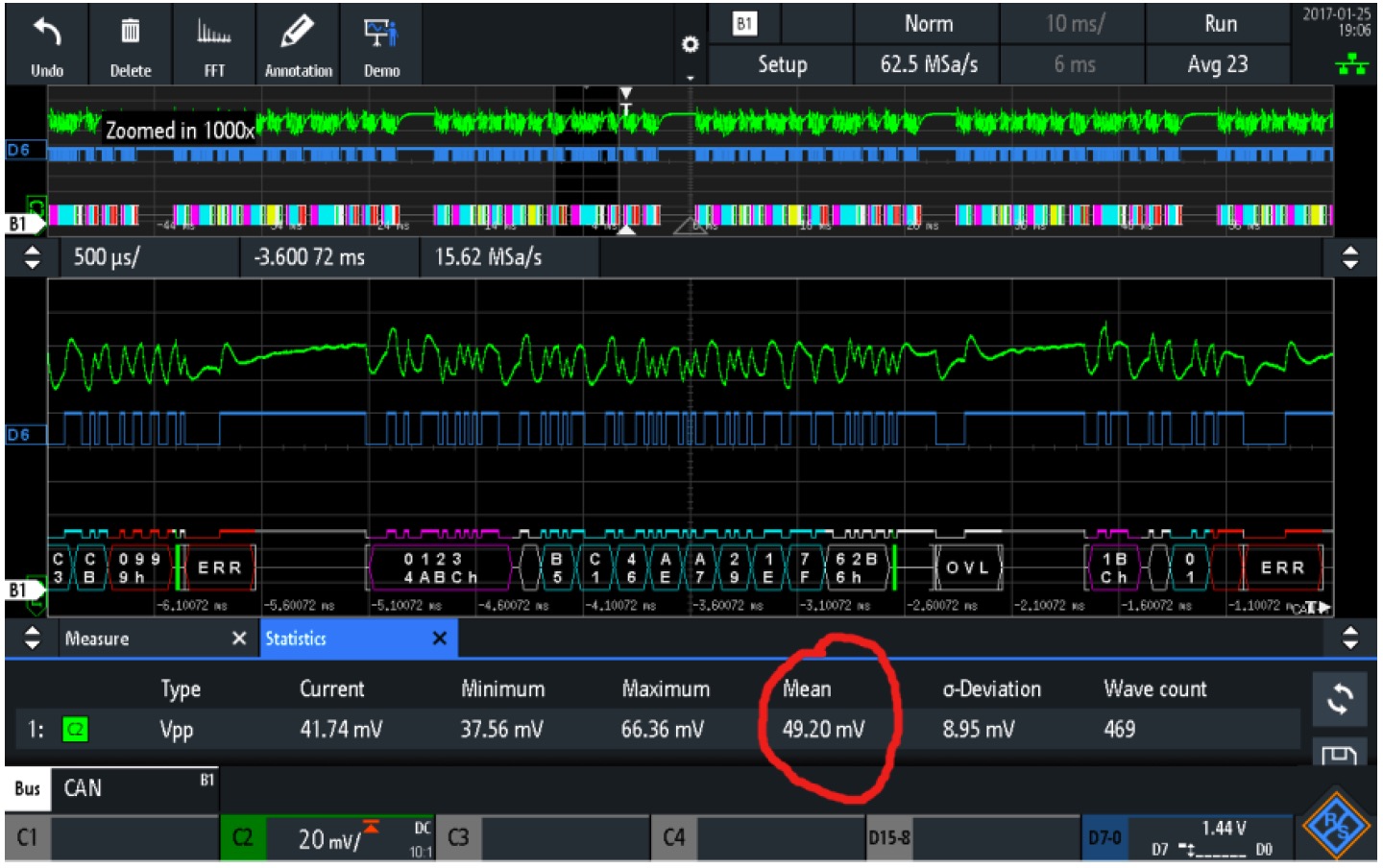
Рисунок. 5. Использование усреднения для удаления части пульсаций постоянного напряжения, не связанных с переключением битов.
Процедура усреднения позволяет удалить все шумы, не связанные с переключением битов. Пульсации постоянного напряжения, вызванные передачей сигналов по шине CAN, теперь изолированы, а их уровень составляет 49,20 мВ.
3. Сравнение результатов измерений, полученных с помощью различных методов
В настоящей статье с помощью осциллографа эконом-класса с полосой пропускания 300 МГц и 10-разрядным АЦП продемонстрировано, как оптимизация настроек систем вертикального и горизонтального отклонения позволяет понять первопричины возникновения пульсаций напряжения источника питания постоянного тока. Объем памяти для сбора данных также имеет большое значение, поскольку частота возникновения большинства связанных событий по своей природе меньше частоты сигналов ИУ. Кроме того, поддержка возможности синхронизации (запуска) по конкретным телеграммам последовательной шины позволяет определить основные причины возникновения событий и выполнить точные измерения пульсаций. На рисунке 6 показано непосредственное сравнение трех видов настроек с иллюстрацией измерительных процедур.
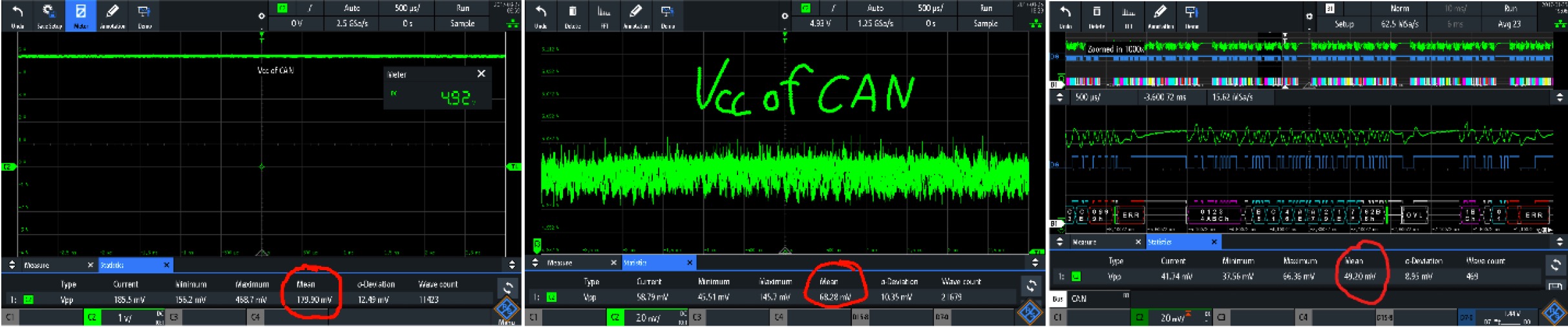
Рисунок 6 Непосредственное сравнение измерений.
Уровень пульсаций напряжения источника питания постоянного тока, определенный в рамках начального измерения, составил приблизительно 180 мВ. Оптимизация настроек системы вертикального отклонения показала, что пульсации находились в диапазоне приблизительно 68 мВ. Наконец, в качестве основной причины возникновения пульсаций была идентифицирована передача данных по шине CAN. Все это стало возможным лишь благодаря использованию долговременной памяти и функции захвата сигналов шины CAN. После синхронизации по конкретным данным шины CAN и усреднения полученных результатов измеренный уровень пульсаций напряжения источника питания постоянного тока, вызванных переключением битов, составил приблизительно 49 мВ, т. е. около 1 % от номинального напряжения.

